Descripción
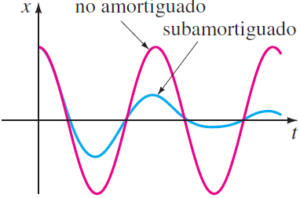
Caso III. λ2 – ω02 < 0. Sistema subamortiguado (u oscilatorio).
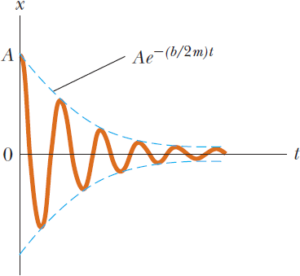
Cuando la fuerza retardadora es pequeña en comparación con la fuerza restauradora máxima, el carácter oscilatorio del movimiento se conserva pero la amplitud disminuye en el tiempo, con el resultado de que al final el movimiento cesa. Cualquier sistema que se comporte de esta forma se conoce como oscilador amortiguado. Las líneas azules discontinuas en la figura, que definen la cubierta de la curva oscilatoria, representan el factor exponencial de la ecuación (2). Ésta cubierta muestra que la amplitud decae exponencialmente con el tiempo. Para movimiento con una constante de resorte y masa de cierto objeto, las oscilaciones se amortiguan más rápidamente para valores más grandes de la fuerza retardadora.
Cuando la magnitud de la fuerza retardadora es pequeña, tal que β / 2 m < ω0, se dice que el sistema esta subamortiguado.
La solución general de la ecuación diferencial
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=0\) (1)
es
x (t) = e– λ t [c1 cos (ω t) + c2 sen (ω t)] (2)
donde la frecuencia angular de oscilación es
\( \displaystyle \omega\sqrt{\omega_0^2-\lambda^2}\) (3)
donde \( \displaystyle \omega_0=\sqrt{\frac{k}{m}}\) representa la frecuencia angular en ausencia de una fuerza retardadora (el oscilador amortiguado) y se llama frecuencia natural del sistema.
Aquí, la masa oscilará debido a las funciones seno y coseno, pero la amplitud de las oscilaciones se hará cada vez más pequeña al aumentar t, debido al factor exponencial e– λ t. Aunque el movimiento es oscilatorio, no es periódico, es decir, el tiempo entre los picos no es constante. Debido a las oscilaciones, se dice que que la masa está subamortiguada en este caso. Esto se debe a una constante de amortiguamiento relativamente pequeña y, por tanto, a una ligera fuerza de amortiguación.
La ecuación de movimiento también puede expresarse como
x (t) = A e– λ t cos (ω t + ϕ) (4)
Donde
\( \displaystyle A=\sqrt{c_1^2+c_2^2}\) (5)
\( \displaystyle \phi=\tan^{-1}\left(-\frac{c_1}{c_2}\right)\) (6)
Dado que el coseno de un ángulo no puede ser mayor que 1, el factor A e– λ t corresponde al desplazamiento máximo, entonces una gráfica de este factor junto con su contraparte negativa forma una envolvente que rodea las oscilaciones.
El movimiento resultante se representa mediante la curva azul de la figura.
Movimiento de un sistema sub-amortiguado.
La figura muestra la posición como función del tiempo para un objeto que oscila en presencia de una fuerza retardadora.
Amplitud del movimiento.
La amplitud A (t) del movimiento viene dada por
A (t) = A0 e– λ t (7)
Constante de tiempo o tiempo de extinción (τ).
La constante de tiempo, o tiempo de extinción es el tiempo necesario para que la energía disminuya en un factor e–1.
\( \displaystyle \tau=\frac{m}{\beta}\) (8)
Energía en el oscilador amortiguado.
\( \displaystyle E\,(t)=E_0\,e^{-\frac{t}{\tau}}\) (9)
\( \displaystyle E\,(t)=\frac{1}{2}m\,\omega^2\,A_0^2e^{-\frac{t}{\tau}}\) (10)
Factor de calidad.
Un oscilador amortiguado se describe normalmente por su factor Q (o factor de calidad):
Q = ω0τ (11)
Frecuencia angular en función del factor de calidad.
\( \displaystyle \omega=\omega_0\sqrt{1-\frac{1}{4\,Q^2}}\) (12)
Si la constante de amortiguamiento β crece gradualmente, la frecuencia angular ω disminuye hasta hacerse igual a cero en el valor crítico.
βc = 2 m ω0 (13)
Verificación de la solución de la ecuación diferencial.
La verificación de la solución de la ecuación diferencial la haremos mediante la solución del siguiente problema:
Referencia: Problema 36. Sección 15.6 del Serway – Jewett. Séptima Edición. Página 444.
Demuestre que la ecuación x (t) = A e– λ t cos (ω t + ϕ) es una solución de la ecuación siempre que b2 < 4 m k.
Solución.
Ecuación diferencial.
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=0\) (1)
Solución de la ecuación diferencial:
x (t) = A e– λ t cos (ω t + ϕ) (2)
Primera derivada.
Al derivar la ecuación (2):
\( \displaystyle \color{red}{\frac{d\,x\,(t)}{d\,t}=-A\,\lambda\,e^{-\lambda\,t}\cos(\omega\,t+\phi)-A\,\omega\,e^{-\lambda\,t}\sin(\omega\,t+\phi)}\) (3)
Segunda derivada.
Al derivar la ecuación (3):
\( \displaystyle \frac{d^2x\,(t)}{d\,t^2}=-A\,\lambda^2e^{-\lambda\,t}\cos(\omega\,t+\phi)+A\,\lambda\,\omega\,e^{-\lambda\,t}\sin(\omega\,t+\phi)+A\,\lambda\,\omega\,e^{-\lambda\,t}\sin(\omega\,t+\phi)-A\,\omega^2e^{-\lambda\,t}\cos(\omega\,t+\phi)\)
\( \displaystyle \color{blue}{\frac{d^2x\,(t)}{d\,t^2}=-A\,\lambda^2e^{-\lambda\,t}\cos(\omega\,t+\phi)+2\,A\,\lambda\,\omega\,e^{-\lambda\,t}\sin(\omega\,t+\phi)-A\,\omega^2e^{-\lambda\,t}\cos(\omega\,t+\phi)}\) (4)
Al sustituir las ecuaciones (2), (3) y (4) en la ecuación diferencial (1):
\( \displaystyle \color{blue}{\frac{d^2x}{d\,t^2}}+2\,\lambda\color{red}{\frac{d\,x}{d\,t}}+\omega_0^2\,\color{green}{x}=\color{blue}{-A\,\lambda^2e^{-\lambda\,t}\cos(\omega\,t+\phi)+A\,\lambda\,\omega\,e^{-\lambda\,t}\sin(\omega\,t+\phi)+A\,\lambda\,\omega\,e^{-\lambda\,t}\sin(\omega\,t+\phi)-A\,\omega^2e^{-\lambda\,t}\cos(\omega\,t+\phi)}+\\2\,\lambda\,[\color{red}{-A\,\lambda\,e^{-\lambda\,t}\cos(\omega\,t+\phi)-A\,\omega\,e^{-\lambda\,t}\sin(\omega\,t+\phi)}]+\omega_0^2\,[\color{green}{A\,e^{-\lambda\,t}\cos(\omega\,t+\phi)}]\)
Al desarrollar los productos en los términos quinto y sexto de la derecha:
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=\color{blue}{-A\,\lambda^2e^{-\lambda\,t}\cos(\omega\,t+\phi)}\color{red}{+A\,\lambda\,\omega\,e^{(-\lambda\,t}\sin(\omega\,t+\phi)}\color{red}{+A\,\lambda\,\omega\,e^{-\lambda\,t}\sin(\omega\,t+\phi)}\color{blue}{-A\,\omega^2e^{-\lambda\,t}\cos(\omega\,t+\phi)}\color{blue}{-\\2\,A\lambda^2e^{-\lambda\,t}\cos(\omega\,t+\phi)}\color{red}{-2\,A\,\lambda\,\omega\,e^{-\lambda\,t}\sin(\omega\,t+\phi)}\color{blue}{+A\,\omega_0^2e^{-\lambda\,t}\cos(\omega\,t+\phi)}\)
La simplificación conduce a:
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=-A\,\lambda^2e^{-\lambda\,t}\cos(\omega\,t+\phi)-A\,\omega^2e^{-\lambda\,t}\cos(\omega\,t+\phi)+A\,\omega_0^2e^{-\lambda\,t}\cos(\omega\,t+\phi)\)
Al tomar factor común A e– λ t cos (ω t + ϕ):
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=-A\,e^{-\lambda\,t}\cos(\omega\,t+\phi)(\lambda^2+\omega^2-\omega_0^2)\)
La frecuencia angular de oscilación es:
ω2 = ω02 – λ2
Al sustituir en la ecuación diferencial:
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=-A\,e^{-\lambda\,t}\cos(\omega\,t+\phi)(\lambda^2+\omega_0^2-\lambda^2-\omega_0^2)\)
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=0\)
Queda demostrado que x (t) = A e– λ t cos (ω t + ϕ) es solución de la ecuación diferencial \( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=0\).
Ecuación de movimiento [x (t)] en función de la posición inicial y de la rapidez inicial.
La determinación de la ecuación de movimiento la haremos mediante la solución del siguiente problema:
Referencia: Problema 12.45 del Alonso – Finn. Página 403.
Determinar el valor de A y ϕ en función de x0 y v0 para un oscilador amortiguado. Aplicar la solución para el caso cuando v0 = 0.
Solución.
Solución de la ecuación diferencial.
x (t) = c1 e– λ t cos (ω t) + c2 e– λ t sen (ω t) (2)
Cálculo de las constantes c1 y c2.
Para t = 0, x = x0.
x0 = c1 (5)
Al derivar la ecuación (1) obtenemos la velocidad:
v (t) = – c1 λ e– λ t cos (ω t) + c1 ω e– λ t sen (ω t) – c2 λ e– λ t sen (ω t) + c2 ω e– λ t cos (ω t)
v (t) = (– c1 λ + c2 ω) e– λ t cos (ω t) + (c1 ω – c2 λ) e– λ t sen (ω t) (6)
Para t = 0, v = v0.
Al sustituir en la ecuación (6):
v0 = – c1 λ + c2 ω (7)
De la ecuación (5):
c1 = x0 (8)
Al sustituir la ecuación (8) en la ecuación (7):
v0 = – x0 λ + c2 ω
El despeje de c2 conduce a:
\( \displaystyle c_2=\frac{v_0+x_0\lambda}{\omega}\) (9)
Ecuación de movimiento.
Al sustituir las ecuaciones (8) y (9) en la ecuación (2):
\( \displaystyle x\,(t)=x_0e^{-\lambda\,t}\cos(\omega\,t)+\frac{v_0+x_0\lambda}{\omega}e^{-\lambda\,t}\sin(\omega\,t)\)
Al tomar factor común A e– λ t:
\( \displaystyle x\,(t)=e^{-\lambda\,t}\left[x_0\cos(\omega\,t)+\frac{v_0+x_0\lambda}{\omega}\sin(\omega\,t)\right]\) (10)
La ecuación anterior se puede escribir en la forma
x (t) = A e– λ t cos (ω t + ϕ)
Siendo:
\( \displaystyle A=\sqrt{x_0^2+\left(\frac{v_0+x_0\lambda}{\omega}\right)^2}\) (11)
\( \displaystyle \phi=\tan^{-1}\left(-\frac{\frac{v_0+x_0\lambda}{\omega}}{x_0}\right)\)
\( \displaystyle \phi=\tan^{-1}\left(-\frac{v_0+x_0\lambda}{x_0\,\omega}\right)\) (12)
Para v0 = 0:
\( \displaystyle A=\sqrt{x_0^2+\left(\frac{x_0\lambda}{\omega}\right)^2}\)
\( \displaystyle A=\sqrt{x_0^2+x_0^2\left(\frac{\lambda}{\omega}\right)^2}\)
\( \displaystyle A=\vert x_0\vert\,\sqrt{1+\left(\frac{\lambda}{\omega}\right)^2}\) (13)
\( \displaystyle \phi=\tan^{-1}\left(-\frac{\lambda}{\omega}\right)\) (14)
Rapidez del objeto.
Al sustituir las ecuaciones (8) y (9) en la ecuación (6):
\( \displaystyle v\,(t)=\left(-x_0\lambda+\frac{v_0+x_0\lambda}{\omega}\omega\right)e^{-\lambda\,t}\cos(\omega\,t)+\left(x_0\omega-\frac{v_0+x_0\lambda}{\omega}\lambda\right)e^{-\lambda\,t}\sin(\omega\,t)\)
\( \displaystyle v\,(t)=(-x_0\lambda+v_0+x_0\lambda)e^{-\lambda\,t}\cos(\omega\,t)+\left(\frac{x_0\omega^2-v_0\lambda-x_0\lambda^2}{\omega}\right)e^{-\lambda\,t}\sin(\omega\,t)\)
\( \displaystyle v\,(t)=v_0e^{-\lambda\,t}\cos(\omega\,t)+\frac{x_0\,(\omega^2-\lambda^2)-v_0\lambda}{\omega}e^{-\lambda\,t}\sin(\omega\,t)\)
Al tomar factor común e– λ t:
\( \displaystyle v\,(t)=e^{-\lambda\,t}\left[v_0\cos(\omega\,t)+\frac{x_0\,(\omega^2-\lambda^2)-v_0\lambda}{\omega}\sin(\omega\,t)\right]\) (15)
Casos particulares.
El objeto se libera desde la posición de equilibrio (x0 = 0) con una velocidad (v0 ≠ 0).
De la ecuación (10):
\( \displaystyle x\,(t)=e^{-\lambda\,t}\left[\frac{v_0}{\omega}\sin(\omega\,t)\right]\)
\( \displaystyle x\,(t)=\frac{v_0}{\omega}e^{-\lambda\,t}\sin(\omega\,t)\) (16)
De la ecuación (15):
\( \displaystyle v\,(t)=e^{-\lambda\,t}\left[v_0\cos(\omega\,t)-\frac{v_0\lambda}{\omega}\sin(\omega\,t)\right]\)
Al tomar factor común v0:
\( \displaystyle v\,(t)=v_0e^{-\lambda\,t}\left[\cos(\omega\,t)-\frac{\lambda}{\omega}\sin(\omega\,t)\right]\) (17)
El objeto se desplaza desde la posición de equilibrio (x0 ≠ 0) y se suelta (v0 = 0):
De la ecuación (10):
\( \displaystyle x\,(t)=e^{-\lambda\,t}\left[x_0\cos(\omega\,t)+\frac{x_0\lambda}{\omega}\sin(\omega\,t)\right]\)
Al tomar factor común v0:
\( \displaystyle x\,(t)=x_0e^{-\lambda\,t}\left[\cos(\omega\,t)+\frac{\lambda}{\omega}\sin(\omega\,t)\right]\) (18)
De la ecuación (15):
\( \displaystyle v\,(t)=e^{-\lambda\,t}\left[\frac{x_0\,(\omega^2-\lambda^2)}{\omega}\sin(\omega\,t)\right]\)
\( \displaystyle v\,(t)=\frac{x_0\,(\omega^2-\lambda^2)}{\omega}e^{-\lambda\,t}\sin(\omega\,t)\) (19)
Condición para que el sistema pase por el punto de equilibrio.
x (t) = 0
De la ecuación (10):
\( \displaystyle 0=e^{-\lambda\,t}\left[x_0\cos(\omega\,t)+\frac{v_0+x_0\lambda}{\omega}\sin(\omega\,t)\right]\)
\( \displaystyle x_0\cos(\omega\,t)+\frac{v_0+x_0\lambda}{\omega}\sin(\omega\,t)=0\)
\( \displaystyle \frac{v_0+x_0\lambda}{\omega}\sin(\omega\,t)=-x_0\cos(\omega\,t)\)
\( \displaystyle \frac{\sin(\omega\,t)}{\cos(\omega\,t)}=-\frac{x_0\omega}{v_0+x_0\lambda}\)
\( \displaystyle \tan(\omega\,t)=-\frac{x_0\omega}{v_0+x_0\lambda}\)
\( \displaystyle \omega\,t=\tan^{-1}\left(-\frac{x_0\omega}{v_0+x_0\lambda}\right)\)
\( \displaystyle t=\frac{1}{\omega}\tan^{-1}\left(-\frac{x_0\omega}{v_0+x_0\lambda}\right)\) (20)
Si el valor de t resultare negativo, se ajusta sumándole π/ω hasta que sea positivo.
Tiempo para el cual la elongación es máxima.
v (t) = 0
De la ecuación (15):
\( \displaystyle 0=e^{-\lambda\,t}\left[v_0\cos(\omega\,t)+\frac{x_0\,(\omega^2-\lambda^2)-v_0\lambda}{\omega}\sin(\omega\,t)\right]\)
\( \displaystyle v_0\cos(\omega\,t)+\frac{x_0\,(\omega^2-\lambda^2)-v_0\lambda}{\omega}\sin(\omega\,t)=0\)
\( \displaystyle \frac{x_0\,(\omega^2-\lambda^2)-v_0\lambda}{\omega}\sin(\omega\,t)=-v_0\cos(\omega\,t)\)
\( \displaystyle \frac{\sin(\omega\,t)}{\cos(\omega\,t)}=-\frac{v_0\omega}{x_0\,(\omega^2-\lambda^2)-v_0\lambda}\)
\( \displaystyle \tan(\omega\,t)=-\frac{v_0\omega}{x_0\,(\omega^2-\lambda^2)-v_0\lambda}\)
\( \displaystyle \omega\,t=\tan^{-1}\left[-\frac{v_0\omega}{x_0\,(\omega^2-\lambda^2)-v_0\lambda}\right]\)
\( \displaystyle t=\frac{1}{\omega}\tan^{-1}\left[-\frac{v_0\omega}{x_0\,(\omega^2-\lambda^2)-v_0\lambda}\right]\) (21)
Si el valor de t resultare negativo, se ajusta sumándole π/ω hasta que sea positivo.