Descripción
Caso I. λ2 – ω02 = 0. Sistema críticamente amortiguado.
Conforme el valor de β aumenta, la amplitud de las oscilaciones disminuye más y más rápidamente. Cuando β alcanza un valor critico βc tal que β / 2 m = ω0, el sistema no oscila y se dice que esta críticamente amortiguado. En este caso, el sistema, una vez liberado del reposo en alguna posición de no equilibrio, se aproxima pero no pasa a través de la posición de equilibrio.
La solución general de la ecuación diferencial \( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=0\) es
x (t) = (c1 + c2 t) e– λ t
En este caso se dice que la masa está críticamente amortiguada porque la fuerza amortiguadora es apenas suficiente para evitar el inicio de cualquier oscilación. Un valor ligeramente menor de la constante de amortiguación β permitirá oscilaciones, y un valor ligeramente mayor de β hará que el movimiento esté sobreamortiguado. Por tanto, éste es el caso límite entre los movimientos sobreamortiguados y subamortiguados. Nuevamente, al aumentar t, ambos términos disminuirán debido al exponente negativo, y x (t) tenderá a cero cuando t → ∞. Aunque el factor t en el segundo término lo hará cr
ecer al aumentar t, el factor exponencial disminuye más rápidamente que el aumento y, como resultado, la masa se moverá hacia su posición de equilibrio en x = 0.
La grafica de posición frente a tiempo para este caso es la curva roja en la figura.
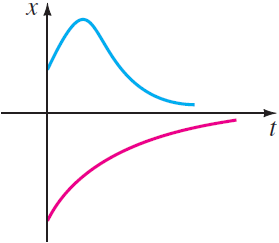
Movimiento de un sistema críticamente amortiguado.
Verificación de la solución de la ecuación diferencial.
La verificación de la solución de la ecuación diferencial la haremos mediante la solución del siguiente problema:
Referencia: Problema 12.47 del Alonso – Finn. Página 403.
¿Qué sucede a la solución de la ecuación \( \displaystyle \omega=\sqrt{\omega_0^2-\lambda^2}\) cuando λ = ω0? Verificar, por sustitución directa, que en este caso la solución general de la ecuación \( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=0\) es x (t) = (c1 + c2 t) e– λ t. Se dice entonces que el oscilador está amortiguado críticamente. Encontrar c1 y c2 si, cuando t = 0, x = x0, y v = v0 y cuando v0 = 0. Representar x en función de t.
Solución.
Si λ = ω0, entonces \( \displaystyle \omega=\sqrt{\omega_0^2-\lambda^2}=0\). Se trata de un sistema críticamente amortiguado.
Ecuación diferencial.
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=0\) (1)
Solución de la ecuación diferencial:
x (t) = (c1 + c2 t) e– λ t (2)
x (t) = c1 e– λ t + c2 t e– λ t (3)
Primera derivada.
Al derivar la ecuación (3):
\( \displaystyle \color{red}{\frac{d\,x}{d\,t}=-c_1\,\lambda\,e^{-\lambda\,t}+ c_2\,e^{-\lambda\,t}-c_2\,\lambda\,t\,e^{-\lambda\,t}}\) (4)
Segunda derivada.
Al derivar la ecuación (4):
\( \displaystyle \color{blue}{\frac{d^2x}{d\,t^2}=c_1\,\lambda^2\,e^{-\lambda\,t}- c_2\,\lambda\,e^{-\lambda\,t}- c_2\,\lambda\,e^{-\lambda\,t}+c_2\,\lambda^2\,t\,e^{-\lambda\,t}}\) (5)
Al sustituir las ecuaciones (3), (4) y (5) en la ecuación diferencial (1):
\( \displaystyle \color{blue}{\frac{d^2x}{d\,t^2}}+2\,\lambda\color{red}{\frac{d\,x}{d\,t}}+\omega_0^2\,\color{green}{x}=\color{blue}{c_1\,\lambda^2\,e^{-\lambda\,t}- c_2\,\lambda\,e^{-\lambda\,t}- c_2\,\lambda\,e^{-\lambda\,t}+c_2\,\lambda^2\,t\,e^{-\lambda\,t}}+\\2\,\lambda\,[\color{red}{-c_1\,\lambda\,e^{-\lambda\,t}+ c_2\,e^{-\lambda\,t}-c_2\,\lambda\,t\,e^{-\lambda\,t}}]+\omega_0^2\,(\color{green}{c_1\,e^{-\lambda\,t}+ c_2\,t\,e^{-\lambda\,t}})\)
Al distribuir los productos en el quinto y sexto términos del lado derecho:
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=\color{blue}{c_1\,\lambda^2\,e^{-\lambda\,t}}-\color{green}{c_2\,\lambda\,e^{-\lambda\,t}}- \color{green}{c_2\,\lambda\,e^{-\lambda\,t}}+\color{red}{c_2\,\lambda^2\,t\,e^{-\lambda\,t}}-\\ \color{blue}{2\,c_1\,\lambda^2\,e^{-\lambda\,t}}+\color{green}{2\,c_2\,\lambda\,e^{-\lambda\,t}}-\color{red}{2\,c_2\,\lambda^2\,t\,e^{-\lambda\,t}}+c_1\,\omega_0^2\,e^{-\lambda\,t}+ c_2\,\omega_0^2\,t\,e^{-\lambda\,t}\)
La simplificación conduce a:
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=-\,c_1\,\lambda^2\,e^{-\lambda\,t}-\,c_2\,\lambda^2\,t\,e^{-\lambda\,t}+c_1\,\omega_0^2\,e^{-\lambda\,t}+ c_2\,\omega_0^2\,t\,e^{-\lambda\,t}\)
c1 e–λ t es factor común en el primero y tercer términos de la derecha y c2 t e–λ t es factor común en el segundo y cuarto términos de la derecha:
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=\,c_1\,(\omega_0^2-\lambda^2)\,e^{-\lambda\,t}+\,c_2\,(\omega_0^2-\lambda^2)\,t\,e^{-\lambda\,t}\)
ω02 – λ2 es factor común en los términos de la derecha:
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=(\omega_0^2-\lambda^2)(c_1\,e^{-\lambda\,t}+\,c_2\,t\,e^{-\lambda\,t})\)
Si ω02 – λ2 = 0 (sistema críticamente amortiguado), la ecuación anterior se reduce a:
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=0\)
Queda demostrado que x (t) = (c1 + c2 t) e– λ t es solución de la ecuación diferencial \( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=0\).
Ecuación de movimiento [x (t)] en función de la posición inicial y de la rapidez inicial.
Cálculo de las constantes c1 y c2.
x (t) = c1 e– λ t + c2 t e– λ t (3)
Para t = 0, x = x0.
Al sustituir en la ecuación (3):
x0 = c1 (6)
Al derivar la ecuación (3) obtenemos la velocidad:
v (t) = – c1 λ e– λ t + c2 e– λ t – c2 λ t e– λ t (7)
Para t = 0, v = v0.
Al sustituir en la ecuación (7):
v0 = – c1 λ + c2 (8)
De la ecuación (6):
c1 = x0 (9)
Al sustituir la ecuación (9) en la ecuación (8):
v0 = – x0 λ + c2
El despeje de c2 conduce a:
c2 = v0 + x0 λ (10)
Ecuación de movimiento.
Al sustituir las ecuaciones (9) y (10) en la ecuación (3):
x (t) = x0 e– λ t + (v0 + x0 λ) t e– λ t
x (t) = e– λ t [x0 + (v0 + x0 λ) t] (11)
Ecuación de la rapidez [v (t)] en función de la posición inicial y de la rapidez inicial.
Al sustituir las ecuaciones (9) y (10) en la ecuación (7):
v (t) = – x0 λ e– λ t + (v0 + x0 λ) e– λ t – (v0 + x0 λ) λ t e– λ t
v (t) = – x0 λ e– λ t + v0 e– λ t + x0 λ e– λ t – (v0 + x0 λ) λ t e– λ t
v (t) = v0 e– λ t – (v0 + x0 λ) λ t e– λ t
v (t) = e– λ t [v0 – (v0 + x0 λ) λ t] (12)
Casos particulares.
El objeto se libera desde la posición de equilibrio (x0 = 0) con una velocidad (v0 ≠ 0).
De la ecuación (11):
x (t) = e– λ t (v0 t)
x (t) = v0 t e– λ t (13)
De la ecuación (12):
v (t) = e– λ t (v0 – v0 λ t)
v (t) = v0 e– λ t (1 – λ t) (14)
El objeto se desplaza desde la posición de equilibrio (x0 ≠ 0) y se suelta (v0 = 0):
De la ecuación (11):
x (t) = e– λ t [x0 + (x0 λ) t]
x (t) = x0 e– λ t (1 + λ t) (15)
De la ecuación (12):
v (t) = – x0 λ2 t e– λ t (16)
Condición para que el sistema pase por el punto de equilibrio.
x (t) = 0
De la ecuación (11):
x0 + (v0 + x0 λ) t = 0
Al despejar el tiempo:
\( \displaystyle t=-\frac{x_0}{v_0+x_0\,\lambda}\) (17)
El sistema eventualmente podría pasar por la posición de equilibrio.
Para v0 = 0:
1 + λ t = 0
\( \displaystyle t=-\frac{1}{\lambda}\) (18)
El sistema no pasa por la posición de equilibrio.
Tiempo para el cual la elongación es máxima.
v (t) = 0
De la ecuación (12):
0 = e– λ t [v0 – (v0 + x0 λ) λ t]
v0 – (v0 + x0 λ) λ t = 0
v0 = (v0 + x0 λ) λ t
\( \displaystyle t=\frac{v_0}{\lambda\,(v_0+x_0\lambda)}\) (19)