Descripción
Caso II. λ2 – ω02 > 0. Sistema sobreamortiguado.
Si el medio es tan viscoso que la fuerza retardadora es grande en comparación con la fuerza restauradora (es decir, si β / 2 m > ω0), el sistema esta sobreamortiguado. De nuevo, el sistema desplazado, cuando tiene libertad para moverse, no oscila sino simplemente regresa a la posición de equilibrio. Conforme el amortiguamiento aumenta, el intervalo de tiempo requerido para que el sistema se aproxime al equilibrio también aumenta, como indica la curva.
La solución general de la ecuación diferencial \( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=0\) es \( \displaystyle x\,(t)=e^{-\lambda\,t}(c_1\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}+c_2\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t})\)
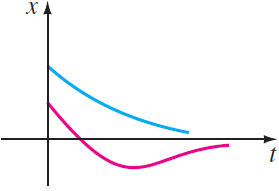
Movimiento de un sistema sobreamortiguado.
Verificación de la solución de la ecuación diferencial.
La verificación de la solución de la ecuación diferencial la haremos mediante la solución del siguiente problema:
Referencia: Problema 12.46 del Alonso – Finn. Página 403.
Verificar, por sustitución directa, que cuando λ > ω0, la solución de la ecuación \( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=0\) para un oscilador amortiguado es \( \displaystyle x\,(t)=c_1\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+c_2\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}\). Encontrar los valores de c1 y c2 si t = 0, x = x0 y v0 = 0. Graficar en función de t.
Solución.
Ecuación diferencial.
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=0\) (1)
Solución de la ecuación diferencial:
\( \displaystyle \color{green}{x\,(t)=c_1\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+c_2\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}}\) (2)
Primera derivada.
Al derivar la ecuación (2):
\( \displaystyle \color{red}{\frac{d\,x\,(t)}{d\,t}=c_1\,(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+c_2\,(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}}\) (3)
Segunda derivada.
Al derivar la ecuación (3):
\( \displaystyle \color{blue}{\frac{d^2x\,(t)}{d\,t^2}=c_1\,(-\lambda+\sqrt{\lambda^2-\omega_0^2})^2\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+c_2\,(-\lambda-\sqrt{\lambda^2-\omega_0^2})^2\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}}\) (4)
Al sustituir las ecuaciones (2), (3) y (4) en la ecuación diferencial (1):
\( \displaystyle \color{blue}{\frac{d^2x}{d\,t^2}}+2\,\lambda\color{red}{\frac{d\,x}{d\,t}}+\omega_0^2\,\color{green}{x}=\color{blue}{c_1\,(-\lambda+\sqrt{\lambda^2-\omega_0^2})^2\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+c_2\,(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}}+\\2\,\lambda\,[\color{red}{c_1\,(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+c_2\,(-\lambda-\sqrt{\lambda^2-\omega_0})\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}}]+\\ \omega_0^2\,[\color{green}{c_1\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+c_2\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}}]\)
Al distribuir los productos en el tercero, cuarto, quinto y sexto términos del lado derecho:
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=c_1\,(-\lambda+\sqrt{\lambda^2-\omega_0^2})^2\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+c_2\,(-\lambda-\sqrt{\lambda^2-\omega_0^2})^2\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}+\\2\,c_1\,\lambda\,(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+2\,c_2\,\lambda\,(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}+\\c_1\,\omega_0^2\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+c_2\,\omega_0^2\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}]\)
Al agrupar los coeficientes de los exponenciales:
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=[c_1\,(-\lambda+\sqrt{\lambda^2-\omega_0^2})^2+2\,c_1\,\lambda\,(-\lambda+\sqrt{\lambda^2-\omega_0^2})+c_1\,\omega_0^2]\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+\\ [c_2\,(-\lambda-\sqrt{\lambda^2-\omega_0^2})^2+2\,c_2\,\lambda\,(-\lambda-\sqrt{\lambda^2-\omega_0^2})+c_2\,\omega_0^2]\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}\)
c1 y c2 es factor común en el primero y segundo término de la derecha, respectivamente:
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=c_1\,[(-\lambda+\sqrt{\lambda^2-\omega_0^2})^2+2\,\lambda\,(-\lambda+\sqrt{\lambda^2-\omega_0^2})+\omega_0^2]\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+\\c_2\,[(-\lambda-\sqrt{\lambda^2-\omega_0^2})^2+2\,\lambda\,(-\lambda-\sqrt{\lambda^2-\omega_0^2})+\omega_0^2]\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}\)
Al desarrollar los productos en los términos de la derecha:
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=c_1\,(\lambda^2-2\,\lambda\sqrt{\lambda^2-\omega_0^2}+\lambda^2-\omega_0^2-2\,\lambda^2+2\lambda \sqrt{\lambda^2-\omega_0^2}+\omega_0^2)\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+\\c_2\,(\lambda^2+2\,\lambda\,\sqrt{\lambda^2-\omega_0^2}+\lambda^2-\omega_0^2-2\,\lambda^2-2\,\lambda\sqrt{\lambda^2-\omega_0^2}+\omega_0^2)\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}\)
La simplificación conduce a:
\( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=0\)
Queda demostrado que \( \displaystyle x\,(t)=c_1\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+c_2\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}\) es solución de la ecuación diferencial \( \displaystyle \frac{d^2x}{d\,t^2}+2\,\lambda\frac{d\,x}{d\,t}+\omega_0^2\,x=0\).
Ecuación de movimiento [x (t)] en función de la posición inicial y de la rapidez inicial.
Cálculo de las constantes c1 y c2.
\( \displaystyle x\,(t)=c_1\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+c_2\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}\) (2)
Para t = 0, x = x0.
Al sustituir en la ecuación (2):
x0 = c1 + c2 (5)
Al derivar la ecuación (2) obtenemos la velocidad:
\( \displaystyle v\,(t)=c_1\,(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+c_2\,(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}\) (6)
Para t = 0, v = v0.
Al sustituir en la ecuación (6):
\( \displaystyle v_0=c_1\,(-\lambda+\sqrt{\lambda^2-\omega_0^2})+c_2\,(-\lambda-\sqrt{\lambda^2-\omega_0^2})\) (7)
De la ecuación (5):
c2 = x0 – c1 (8)
Al sustituir la ecuación (8) en la ecuación (7):
\( \displaystyle v_0=c_1\,(-\lambda+\sqrt{\lambda^2-\omega_0^2})+(x_0-c_1)\,(-\lambda-\sqrt{\lambda^2-\omega_0^2})\)
\( \displaystyle v_0=-c_1\,\lambda+c_1\sqrt{\lambda^2-\omega_0^2})-x_0\lambda-x_0\sqrt{\lambda^2-\omega_0^2}+c_1\lambda+c_1\sqrt{\lambda^2-\omega_0^2}\)
\( \displaystyle v_0=2\,c_1\sqrt{\lambda^2-\omega_0^2})-x_0\lambda-x_0\sqrt{\lambda^2-\omega_0^2}\)
\( \displaystyle v_0+x_0\lambda+x_0\sqrt{\lambda^2-\omega_0^2}=2\,c_1\sqrt{\lambda^2-\omega_0^2}\)
El despeje de c1 conduce a:
\( \displaystyle c_1=\frac{v_0+x_0\lambda+x_0\sqrt{\lambda^2-\omega_0^2}}{2\,\sqrt{\lambda^2-\omega_0^2}}\)
\( \displaystyle c_1=\frac{v_0+x_0\lambda}{2\,\sqrt{\lambda^2-\omega_0^2}}+\frac{x_0}{2}\)
\( \displaystyle c_1=\frac{x_0}{2}+\frac{v_0+x_0\lambda}{2\,\sqrt{\lambda^2-\omega_0^2}}\) (9)
De la ecuación (8):
\( \displaystyle c_2=x_0-\left(\frac{x_0}{2}+\frac{v_0+x_0\lambda}{2\,\sqrt{\lambda^2-\omega_0^2}}\right)\)
\( \displaystyle c_2=x_0-\frac{x_0}{2}-\frac{v_0+x_0\lambda}{2\,\sqrt{\lambda^2-\omega_0^2}}\)
\( \displaystyle c_2=\frac{x_0}{2}-\frac{v_0+x_0\lambda}{2\,\sqrt{\lambda^2-\omega_0^2}}\) (10)
Ecuación de movimiento.
Al sustituir las ecuaciones (9) y (10) en la ecuación (2):
\( \displaystyle x\,(t)=\left(\frac{x_0}{2}+\frac{v_0+x_0\lambda}{2\,\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+\left(\frac{x_0}{2}-\frac{v_0+x_0\lambda}{2\,\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}\)
Se descomponen los exponenciales:
\( \displaystyle x\,(t)=\left(\frac{x_0}{2}+\frac{v_0+x_0\lambda}{2\,\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\lambda\,t}\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}+\left(\frac{x_0}{2}-\frac{v_0+x_0\lambda}{2\,\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\lambda\,t}\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t}\)
Al tomar factor común \( \displaystyle \frac{1}{2}e^{-\lambda\,t}\):
\( \displaystyle x\,(t)=\frac{1}{2}e^{-\lambda\,t}\,\left[\left(x_0+\frac{v_0+x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}+\left(x_0-\frac{v_0+x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t}\right]\) (11)
Ecuación de la rapidez [v (t)] en función de la posición inicial y de la rapidez inicial.
Al sustituir las ecuaciones (9) y (10) en la ecuación (6):
\( \displaystyle v\,(t)=\left(\frac{x_0}{2}+\frac{v_0+x_0\lambda}{2\,\sqrt{\lambda^2-\omega_0^2}}\right)\,(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+\left(\frac{x_0}{2}-\frac{v_0+x_0\lambda}{2\,\sqrt{\lambda^2-\omega_0^2}}\right)\,(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}\)
Para simplificar el procedimiento matemático que conduce a la expresión simplificada de la expresión de la rapidez del objeto, se determina el coeficiente de cada exponencial por separado.
\( \displaystyle v\,(t)=A\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+B\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}\) (12)
Coeficiente de \( \displaystyle e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}\):
\( \displaystyle A=\left(\frac{x_0}{2}+\frac{v_0+x_0\lambda}{2\,\sqrt{\lambda^2-\omega_0^2}}\right)\,(-\lambda+\sqrt{\lambda^2-\omega_0^2})\)
\( \displaystyle A=\frac{1}{2}\left(x_0+\frac{v_0+x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,(-\lambda+\sqrt{\lambda^2-\omega_0^2})\)
\( \displaystyle A=\frac{1}{2}\left(-x_0\lambda+x_0\sqrt{\lambda^2-\omega_0^2}-\frac{(v_0+x_0\lambda)\,\lambda}{\sqrt{\lambda^2-\omega_0^2}}+v_0+x_0\lambda\right)\)
\( \displaystyle A=\frac{1}{2}\left(x_0\sqrt{\lambda^2-\omega_0^2}-\frac{(v_0+x_0\lambda)\,\lambda}{\sqrt{\lambda^2-\omega_0^2}}+v_0\right)\)
\( \displaystyle A=\frac{1}{2}\left(\frac{x_0\,(\lambda^2-\omega_0^2)-(v_0+x_0\lambda)\,\lambda}{\sqrt{\lambda^2-\omega_0^2}}+v_0\right)\)
\( \displaystyle A=\frac{1}{2}\left(\frac{x_0\,\lambda^2-x_0\omega_0^2-v_0\lambda-x_0\lambda^2}{\sqrt{\lambda^2-\omega_0^2}}+v_0\right)\)
\( \displaystyle A=\frac{1}{2}\left(\frac{-x_0\omega_0^2-v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}+v_0\right)\)
\( \displaystyle A=\frac{1}{2}\left(v_0-\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\) (13)
Coeficiente de \( \displaystyle e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}\):
\( \displaystyle B=\left(\frac{x_0}{2}-\frac{v_0+x_0\lambda}{2\,\sqrt{\lambda^2-\omega_0^2}}\right)\,(-\lambda-\sqrt{\lambda^2-\omega_0^2})\)
\( \displaystyle B=\frac{1}{2}\left(x_0-\frac{v_0+x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,(-\lambda-\sqrt{\lambda^2-\omega_0^2})\)
\( \displaystyle B=\frac{1}{2}\left(-x_0\lambda-x_0\sqrt{\lambda^2-\omega_0^2}+\frac{(v_0+x_0\lambda)\,\lambda}{\sqrt{\lambda^2-\omega_0^2}}+v_0+x_0\lambda\right)\)
\( \displaystyle B=\frac{1}{2}\left(-x_0\sqrt{\lambda^2-\omega_0^2}+\frac{(v_0+x_0\lambda)\,\lambda}{\sqrt{\lambda^2-\omega_0^2}}+v_0\right)\)
\( \displaystyle B=\frac{1}{2}\left(\frac{-x_0\,(\lambda^2-\omega_0^2)+(v_0+x_0\lambda)\,\lambda}{\sqrt{\lambda^2-\omega_0^2}}+v_0\right)\)
\( \displaystyle B=\frac{1}{2}\left(\frac{-x_0\,\lambda^2+x_0\omega_0^2+v_0\lambda+x_0\lambda^2}{\sqrt{\lambda^2-\omega_0^2}}+v_0\right)\)
\( \displaystyle B=\frac{1}{2}\left(\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}+v_0\right)\)
\( \displaystyle B=\frac{1}{2}\left(v_0+\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\) (14)
Al sustituir las expresiones (13) y (14) en la ecuación de la rapidez:
\( \displaystyle v\,(t)=\frac{1}{2}\left(v_0-\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{(-\lambda+\sqrt{\lambda^2-\omega_0^2})\,t}+\frac{1}{2}\left(v_0+\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{(-\lambda-\sqrt{\lambda^2-\omega_0^2})\,t}\)
Se descomponen los exponenciales:
\( \displaystyle v\,(t)=\frac{1}{2}\left(v_0-\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\lambda\,t}\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}+\frac{1}{2}\left(v_0+\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\lambda\,t}\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t}\)
Al tomar factor común \( \displaystyle \frac{1}{2}e^{-\lambda\,t}\):
\( \displaystyle v\,(t)=\frac{1}{2}e^{-\lambda\,t}\left[\left(v_0-\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}+\left(v_0+\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t}\right]\) (15)
Casos particulares.
El objeto se libera desde la posición de equilibrio (x0 = 0) con una velocidad (v0 ≠ 0).
De la ecuacion (11):
\( \displaystyle x\,(t)=\frac{1}{2}e^{-\lambda\,t}\,\left(\frac{v_0}{\sqrt{\lambda^2-\omega_0^2}}\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}-\frac{v_0}{\sqrt{\lambda^2-\omega_0^2}}\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t}\right)\)
\( \displaystyle x\,(t)=\frac{v_0}{\sqrt{\lambda^2-\omega_0^2}}e^{-\lambda\,t}\,\left(\frac{e^{\sqrt{\lambda^2-\omega_0^2}\,t}}{2}-\frac{e^{-\sqrt{\lambda^2-\omega_0^2}\,t}}{2}\right)\)
\( \displaystyle x\,(t)=\frac{v_0}{\sqrt{\lambda^2-\omega_0^2}}e^{-\lambda\,t}\,\left(\frac{e^{\sqrt{\lambda^2-\omega_0^2}\,t}-e^{-\sqrt{\lambda^2-\omega_0^2}\,t}}{2}\right)\)
\( \displaystyle x\,(t)=\frac{v_0}{\sqrt{\lambda^2-\omega_0^2}}e^{-\lambda\,t}\,\sinh(\sqrt{\lambda^2-\omega_0^2}\,t)\) (16)
De la ecuación (15):
\( \displaystyle v\,(t)=\frac{1}{2}e^{-\lambda\,t}\left[\left(v_0-\frac{v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}+\left(v_0+\frac{v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t}\right]\)
\( \displaystyle v\,(t)=\frac{1}{2}v_0\,e^{-\lambda\,t}\left[\left(1-\frac{\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}+\left(1+\frac{\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t}\right]\)
(17)
El objeto se desplaza desde la posición de equilibrio (x0 ≠ 0) y se suelta (v0 = 0):
De la ecuación (11):
\( \displaystyle x\,(t)=\frac{1}{2}e^{-\lambda\,t}\,\left[\left(x_0+\frac{x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}+\left(x_0-\frac{x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t}\right]\)
\( \displaystyle x\,(t)=\frac{1}{2}x_0\,e^{-\lambda\,t}\,\left[\left(1+\frac{\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}+\left(1-\frac{\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t}\right]\) (18)
De la ecuación (15):
\( \displaystyle v\,(t)=\frac{1}{2}e^{-\lambda\,t}\left[\left(-\frac{x_0\omega_0^2}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}+\left(\frac{x_0\omega_0^2}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t}\right]\)
\( \displaystyle v\,(t)=\frac{x_0\omega_0^2}{\sqrt{\lambda^2-\omega_0^2}}e^{-\lambda\,t}\left(-\frac{\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}}{2}+\frac{e^{-\sqrt{\lambda^2-\omega_0^2}\,t}}{2}\right)\)
\( \displaystyle v\,(t)=\frac{x_0\omega_0^2}{\sqrt{\lambda^2-\omega_0^2}}e^{-\lambda\,t}\left(-\frac{\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}-e^{-\sqrt{\lambda^2-\omega_0^2}\,t}}{2}\right)\)
\( \displaystyle v\,(t)=-\frac{x_0\omega_0^2}{\sqrt{\lambda^2-\omega_0^2}}e^{-\lambda\,t}\sinh(\sqrt{\lambda^2-\omega_0^2}\,t)\)
(19)
Condición para que el sistema pase por el punto de equilibrio.
x (t) = 0
De la ecuación (11):
\( \displaystyle 0=\frac{1}{2}e^{-\lambda\,t}\,\left[\left(x_0+\frac{v_0+x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}+\left(x_0-\frac{v_0+x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t}\right]\)
\( \displaystyle \left(x_0+\frac{v_0+x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}+\left(x_0-\frac{v_0+x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t}=0\)
Se agrupan los exponenciales:
\( \displaystyle \left(x_0+\frac{v_0+x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}=-\left(x_0-\frac{v_0+x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t}\)
\( \displaystyle \left(x_0+\frac{v_0+x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{2\sqrt{\lambda^2-\omega_0^2}\,t}=-\left(x_0-\frac{v_0+x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\)
\( \displaystyle \left(\frac{v_0+x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}+x_0\right)\,e^{2\sqrt{\lambda^2-\omega_0^2}\,t}=\frac{v_0+x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}-x_0\)
\( \displaystyle e^{2\sqrt{\lambda^2-\omega_0^2}\,t}=\frac{\frac{v_0+x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}-x_0}{\frac{v_0+x_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}+x_0}\)
\( \displaystyle e^{2\sqrt{\lambda^2-\omega_0^2}\,t}=\frac{v_0+x_0\lambda-x_0\sqrt{\lambda^2-\omega_0^2}}{v_0+x_0\lambda+x_0\sqrt{\lambda^2-\omega_0^2}}\)
Aplicando logaritmos:
\( \displaystyle 2\sqrt{\lambda^2-\omega_0^2}\,t=\ln\left(\frac{v_0+x_0\lambda-x_0\sqrt{\lambda^2-\omega_0^2}}{v_0+x_0\lambda+x_0\sqrt{\lambda^2-\omega_0^2}}\right)\)
\( \displaystyle t=\frac{1}{2\sqrt{\lambda^2-\omega_0^2}}\ln\left(\frac{v_0+x_0\lambda-x_0\sqrt{\lambda^2-\omega_0^2}}{v_0+x_0\lambda+x_0\sqrt{\lambda^2-\omega_0^2}}\right)\)
\( \displaystyle t=\frac{1}{2\sqrt{\lambda^2-\omega_0^2}}\ln\left[\frac{v_0+x_0(\lambda-\sqrt{\lambda^2-\omega_0^2})}{v_0+x_0(\lambda+\sqrt{\lambda^2-\omega_0^2})}\right]\) (20)
Tiempo para el cual la elongación es máxima.
v (t) = 0
De la ecuación (15):
\( \displaystyle 0=\frac{1}{2}e^{-\lambda\,t}\left[\left(v_0-\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}+\left(v_0+\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t}\right]\)
\( \displaystyle \left(v_0-\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}+\left(v_0+\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t}=0\)
\( \displaystyle \left(v_0-\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{\sqrt{\lambda^2-\omega_0^2}\,t}=-\left(v_0+\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{-\sqrt{\lambda^2-\omega_0^2}\,t}\)
Se agrupan los exponenciales:
\( \displaystyle \left(v_0-\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\,e^{2\sqrt{\lambda^2-\omega_0^2}\,t}=-\left(v_0+\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}\right)\)
\( \displaystyle \left(\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}-v_0\right)\,e^{2\sqrt{\lambda^2-\omega_0^2}\,t}=\frac{x_0\omega_0^2+v_0\lambda}{\sqrt{\lambda^2-\omega_0^2}}+v_0\)
\( \displaystyle e^{2\sqrt{\lambda^2-\omega_0^2}\,t}=\frac{x_0\omega_0^2+v_0\lambda+v_0\sqrt{\lambda^2-\omega_0^2}}{x_0\omega_0^2+v_0\lambda-v_0\sqrt{\lambda^2-\omega_0^2}}\)
Aplicando logaritmos:
\( \displaystyle 2\sqrt{\lambda^2-\omega_0^2}\,t=\ln\left(\frac{x_0\omega_0^2+v_0\lambda+v_0\sqrt{\lambda^2-\omega_0^2}}{x_0\omega_0^2+v_0\lambda-v_0\sqrt{\lambda^2-\omega_0^2}}\right)\)
\( \displaystyle t=\frac{1}{2\sqrt{\lambda^2-\omega_0^2}}\ln\left(\frac{x_0\omega_0^2+v_0\lambda+v_0\sqrt{\lambda^2-\omega_0^2}}{x_0\omega_0^2+v_0\lambda-v_0\sqrt{\lambda^2-\omega_0^2}}\right)\)
\( \displaystyle t=\frac{1}{2\sqrt{\lambda^2-\omega_0^2}}\ln\left[\frac{x_0\omega_0^2+v_0(\lambda+\sqrt{\lambda^2-\omega_0^2})}{x_0\omega_0^2+v_0(\lambda-\sqrt{\lambda^2-\omega_0^2})}\right]\) (21)